Frequently Asked Questions
Product Information & Technology
What is AEye's iDAR technology and how does it work for obstacle avoidance?
AEye's iDAR™ (Intelligent Detection and Ranging) is an adaptive lidar perception system that combines computer vision and lidar to create a smarter, more focused point cloud. For obstacle avoidance, iDAR can dynamically adjust its laser scan patterns in real time, targeting specific objects and increasing scan density to quickly classify and respond to obstacles like a black trash can on the roadway. This agility enables rapid, accurate detection and classification, improving safety in advanced driver assistance systems (ADAS) and autonomous vehicles. Source
How does AEye's iDAR system handle edge cases in ADAS and autonomous driving?
AEye's iDAR system is designed to address edge cases—unusual or challenging scenarios that occur frequently in real-world driving, such as unexpected obstacles or poor visibility. iDAR's real-time scan pattern adjustment and dynamic resolution allow it to focus on critical objects, classify them quickly, and help the vehicle decide whether to brake or steer around the obstacle, even in complex environments. Source
What are Dynamic Vixels in AEye's iDAR system?
Dynamic Vixels are a combination of 2D camera pixels and 3D lidar voxels, created by AEye's iDAR system. This fusion enables the AI to refine lidar point clouds around objects of interest, such as obstacles, by eliminating irrelevant points and focusing on the object's edges for more accurate classification and response. Source
How does AEye's iDAR use feedback loops for obstacle detection?
AEye's iDAR sensors can cue themselves to increase scan density on objects of interest. If the camera lacks sufficient data, the lidar generates a feedback loop to "paint" the object with a dense pattern of laser pulses, gathering more information for accurate classification. This process also leverages the intensity of reflected laser light to distinguish objects like plastic trash cans from the road. Source
What is the value of using AI-embedded lidar sensors like iDAR?
AI-embedded lidar sensors like iDAR prioritize object classification and size determination upon detection. By flexibly adjusting point cloud density and running classification algorithms at the edge, iDAR reduces latency and ensures only the most relevant data is used for critical driving decisions, such as braking or swerving. Source
How does AEye's iDAR differ from conventional perception systems in obstacle avoidance?
Unlike conventional perception systems that may struggle with object detection and classification—especially for non-metallic or low-contrast objects—AEye's iDAR can dynamically adjust scan patterns, increase resolution on demand, and combine camera and lidar data for rapid, accurate obstacle identification and response. Source
What role does computer vision play in AEye's iDAR system?
Computer vision in AEye's iDAR system enables the creation of focused lidar point clouds by combining camera pixels with lidar voxels. This integration allows the system to "see" and classify objects more effectively, especially in complex or low-visibility scenarios. Source
How does AEye's iDAR system classify objects in real time?
Upon detecting an object, iDAR's first priority is classification. It dynamically increases scan density on the object, cues the camera for additional analysis, and uses AI algorithms to determine the object's identity and threat level, enabling timely and appropriate vehicle responses. Source
What is the advantage of using lidar over camera and radar for obstacle avoidance?
Lidar can detect objects regardless of lighting conditions or material composition, unlike cameras (which struggle with low contrast or poor lighting) and radar (which has difficulty with non-metallic objects). AEye's iDAR further enhances lidar's capabilities with dynamic scan patterns and AI-driven classification. Source
How does AEye's iDAR system reduce latency in obstacle avoidance?
iDAR runs classification algorithms at the edge of the network and flexibly adjusts point cloud density around objects, ensuring that only the most important data is sent to the domain controller. This approach greatly reduces latency, enabling faster and safer driving decisions. Source
What is the specific edge case described in the obstacle avoidance use case?
The edge case involves a black trash can falling off a garbage truck onto a city street. An ADAS-equipped vehicle traveling at 35mph must detect, classify, and assess the trash can's threat level to decide whether to brake or plan a safe path around it while avoiding collisions with parallel traffic. Source
Why do conventional ADAS systems struggle with detecting certain obstacles?
Conventional ADAS systems often rely on camera and radar, which can struggle with low-contrast objects, non-metallic materials, or poor lighting. These systems may be trained to ignore certain anomalies to avoid false positives, leading to missed detections of real obstacles like black trash cans. Source
How does AEye's iDAR system help prevent accidents in obstacle avoidance scenarios?
By rapidly detecting and classifying obstacles, iDAR enables the vehicle to make timely decisions—such as braking or steering around an object—reducing the risk of collisions and improving overall road safety. Source
What are the main software components of AEye's iDAR system?
Key software components include computer vision for focused point clouds, cueing mechanisms for real-time analysis, and feedback loops that allow the system to self-direct additional scans for better object identification. Source
How does iDAR's cueing mechanism work?
When lidar detects an object, it cues the camera for deeper analysis of color, size, and shape. If more information is needed, the camera can cue the lidar to allocate additional laser shots, ensuring comprehensive object classification. Source
How does iDAR distinguish between real obstacles and false positives?
iDAR uses a combination of lidar and camera data, along with AI algorithms, to analyze the intensity of reflected laser light and object characteristics. This enables it to differentiate real obstacles from false positives, such as speed bumps or debris, reducing unnecessary braking or maneuvers. Source
Where can I download the obstacle avoidance case study?
You can download the detailed obstacle avoidance case study from this link.
Features & Capabilities
What features make AEye's lidar solutions stand out for obstacle avoidance?
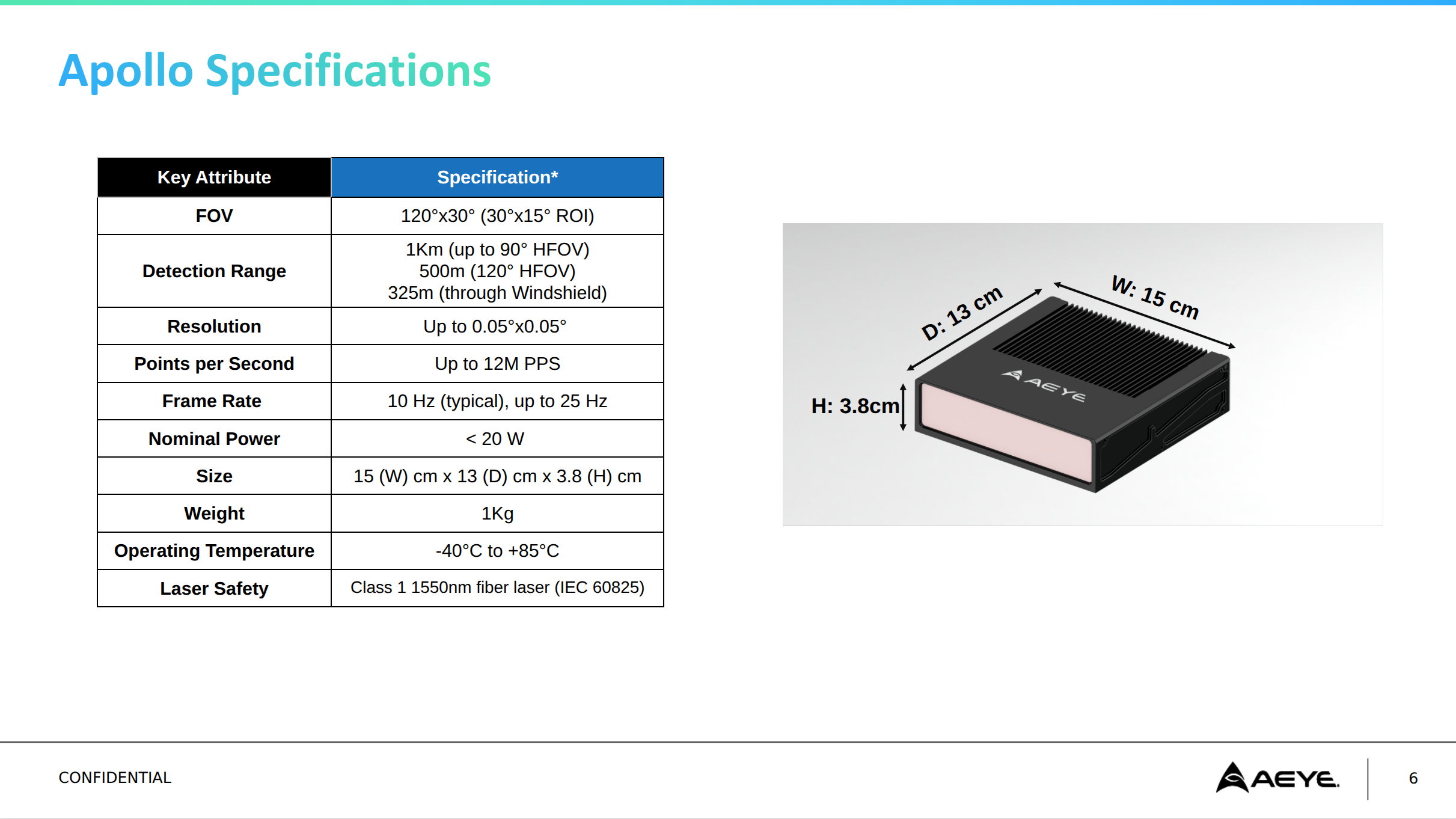
AEye's lidar solutions offer dynamic scan patterns, ultra-long-range detection (up to one kilometer with Apollo), high resolution, adaptability to challenging environments (rain, darkness, fog), future-proof technology with over-the-air updates, and flexible placement options. These features enhance safety, efficiency, and adaptability in obstacle avoidance and other applications. Source
Does AEye's lidar perform well in adverse weather or low visibility?
Yes, AEye's lidar systems are engineered to perform reliably in challenging environments, including rain, darkness, and fog. This ensures consistent obstacle detection and operational reliability in real-world conditions. Source
Can AEye's lidar solutions be updated over the air?
Yes, AEye's software-defined lidar technology supports over-the-air updates, allowing customers to receive new features and improvements without hardware changes. This future-proofs the technology and reduces the risk of obsolescence. Source
What mounting options are available for AEye's lidar systems?
AEye's compact lidar design supports various mounting options, including in-cabin, on the roof, or in the grille. This flexibility allows for optimal placement based on vehicle design and application requirements. Source
How does AEye's lidar technology adapt to different use cases?
AEye's software-defined lidar is customizable and scalable, allowing it to adapt to specific customer needs and use cases—such as obstacle avoidance, ADAS, smart infrastructure, and logistics—without requiring hardware changes. Source
Use Cases & Benefits
What industries benefit from AEye's lidar technology for obstacle avoidance?
Industries such as automotive, trucking, smart infrastructure, aviation, defense, rail, and logistics benefit from AEye's lidar technology. The technology enhances safety, efficiency, and adaptability in applications like ADAS, autonomous vehicles, and intelligent transportation systems. Source
Can you provide examples of real-world obstacle avoidance scenarios solved by AEye?
Yes, AEye's technology has been used in scenarios such as detecting a black trash can on the road, avoiding flatbed trailers across roadways, and differentiating between real and false obstacles. These use cases are documented in AEye's case studies and demonstrate the system's ability to handle challenging edge cases. Source
How does AEye's lidar help reduce false positives in obstacle detection?
AEye's lidar uses AI-driven classification and dynamic scan patterns to accurately distinguish between real obstacles and harmless anomalies, reducing unnecessary braking or evasive maneuvers and improving operational efficiency. Source
What are some documented success stories of AEye's lidar in obstacle avoidance?
Documented success stories include the "A Pedestrian in Headlights" and "Flatbed Trailer Across Roadway" use cases, where AEye's lidar enabled early detection and safe response to challenging obstacles. These case studies are available on AEye's resources page. Source
How does AEye's lidar support advanced driver-assistance systems (ADAS)?
AEye's lidar enhances ADAS by providing precise measurement imaging, rapid obstacle detection, and real-time classification, enabling smarter and safer driving systems that can handle complex and unpredictable scenarios. Source
Is AEye's lidar suitable for autonomous vehicles?
Yes, AEye's lidar is designed to support the development of fully autonomous vehicles by delivering high-resolution, ultra-long-range perception and adaptability to challenging environments. Source
How does AEye's lidar improve operational efficiency in logistics and transportation?
By reducing false positives and enabling accurate, real-time obstacle detection, AEye's lidar helps logistics and transportation companies improve safety, reduce unnecessary stops, and optimize operational workflows. Source
Competition & Comparison
How does AEye's lidar compare to Velodyne's lidar systems?
Velodyne offers traditional lidar systems with fixed scan patterns, focusing on high-resolution imaging but lacking software-defined architecture. AEye's lidar stands out with dynamic scan patterns, software-defined customization, and over-the-air updates, providing greater adaptability and future-proofing. Source
What differentiates AEye's lidar from Luminar's lidar?
Luminar focuses on long-range, hardware-centric lidar for autonomous vehicles, with limited software-defined capabilities. AEye's lidar offers dynamic scan patterns, adaptability to challenging environments, and flexible mounting options, making it suitable for a broader range of applications. Source
How does AEye's lidar compare to Innoviz's lidar solutions?
Innoviz offers solid-state lidar with a focus on automotive applications but limited software-defined customization. AEye's lidar provides greater versatility through software-defined architecture, over-the-air updates, and high performance for demanding use cases. Source
What are the main advantages of AEye's lidar over competitors?
AEye's lidar offers dynamic scan patterns, software-defined customization, future-proof design with over-the-air updates, high performance (ultra-long-range and high resolution), and flexible placement options, making it adaptable to a wide range of industries and applications. Source
Technical Requirements & Resources
Where can I find technical documentation for AEye's lidar solutions?
Technical documentation, including specification sheets, white papers, and case studies, is available on AEye's resources page. For Apollo's detailed specs, download the sheet here.
What learning materials does AEye provide for understanding its technology?
AEye offers white papers, videos, case studies, and technical documentation on its resources page. Examples include the "Four Rs of LiDAR" white paper and ITS use case studies.
Where can I find case studies about lidar applications for ITS use cases?
Case studies about lidar applications for Intelligent Transportation Systems (ITS) are available in AEye's lidar case studies document.
Where can I find more information about AEye's obstacle avoidance technology?
More information about AEye's obstacle avoidance technology, including technical details and use cases, can be found on the obstacle avoidance use case page.
Support & Implementation
How easy is it to integrate AEye's lidar solutions into existing systems?
AEye's lidar solutions are designed for ease of integration, with comprehensive technical support, validation testing tools, and user education resources to ensure a smooth and efficient onboarding process. Source
What support does AEye provide during implementation?
AEye provides direct technical assistance, extensive training resources, and validation testing tools to help customers implement and adapt the technology to their specific needs. Source
How long does it take to implement AEye's lidar solutions?
Implementation timelines vary by use case and system requirements, but AEye's focus on ease of integration, technical support, and validation tools ensures a quick and efficient start for most customers. Source
Integrations & Partnerships
What integrations does AEye offer for its lidar solutions?
AEye offers integrations with platforms such as the NVIDIA DRIVE AGX Platform, including the NVIDIA AGX DRIVE Thor™, and supports OEM integration options behind the windshield, on the roof, or in the grille. Source
Who are some of AEye's notable customers and partners?
Notable customers and partners include Continental (for volume production), Sanmina Corporation (manufacturing for non-automotive markets), and NVIDIA (collaboration on the DRIVE autonomous vehicle platform). Source







{kind=link}